Đề
thi năm nay có một số yêu cầu cần giải quyết như sau:
- Cảm biến
màu sắc:
dùng để phân biệt màu của khối ngọc (xanh/đỏ).
-
Giải pháp 1: Sử dụng IC TCS3200. IC này giao tiếp số, tiện cho các vi điều khiển
không có ADC. Hiện nay trên thị trường cũng có bán sẵn các module này.

Moudule Cảm biến mầu TCS3200 có 2 hàng jum để giao tiếp
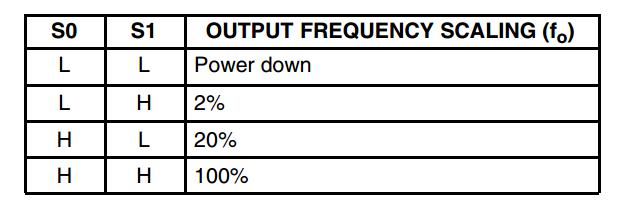
+S0,S1 : Đầu vào chọn tỉ lệ tần số đầu ra .
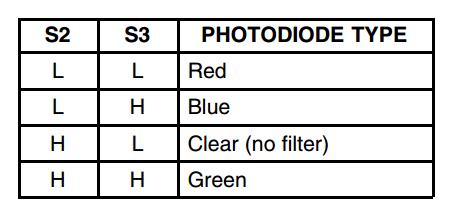
+S2,S3 : Đầu vào chọn kiểu photodiode.
+OE : Đầu vào cho phép xuất tần số ở chân OUT.
+OUT : Đầu ra là tần số thay đổi phụ thuộc cường
độ và màu sắc.
Tính năng :
+Chuyển đổi cường độ ánh sáng thành
tần số có độ phân giải cao.
+Lập trình lựa chọn bộ lọc màu sắc khác nhau và
dạng tần số xuất ra.
+Dễ dàng giao tiếp với vi điều khiển.
+Điện
áp đầu vào 2.7-5.5V.
Nguyên lý hoạt động cảm biến mầu TCS3200 :
-Cấu tạo cảm biến TCS3200 gồm 2 khối như hình
vẽ phía dưới:

+Khối đầu tiên là mảng ma trận 8x8 gồm các
photodiode.Bao gồm 16 photodiode có thể lọc màu sắc xanh dương (Blue),16
photodiode có thể lọc màu đỏ (Red),16 photodiode có thể lọc màu xanh lá(Green)
và 16 photodiode trắng không lọc (Clear).Tất cả photodiode cùng màu được kết nối
song song với nhau ,và được đặt xen kẽ nhau nhằm mục đích chống nhiễu.
Bản chất của 4 loại photodiode trên như là các
bộ lọc ánh sáng có mầu sắc khác nhau .Có nghĩa nó chỉ tiếp nhận các ánh sáng có
cùng màu với loại photodiode tương ứng và không tiếp nhận các ánh sáng có màu sắc
khác.

Việc lựa chọn 4 loại photodiode này thông qua
2 chân đầu vào S2,S3 :
+Khối thứ 2 là bộ chuyển đổi dòng điện từ đầu
ra khối thứ nhất thành tần số :
Tần số đầu ra có độ rộng xung 50% và tỉ lệ với
ánh sáng có cường độ và mầu sắc khác nhau .
Tần số đầu ra nằm trong khoảng 2Hz-500Khz .
Ta có thể lựa chọn tỉ lệ tần số đầu ra ở các mức
khác nhau như bảng trên cho phù hợp với phần cứng đo tần số .
Ví dụ : Tần số khi S0=H,S1=H -Fout=500Khz thì:
S0=H,S1=L -Fout=100Khz
S0=L,S1=H -Fout=10Khz
S0=L,S1=L -Fout=0
-Nguyên lý hoạt động :
Ánh sáng trắng là hỗn hợp rất nhiều ánh sáng có
bước sóng màu sắc khác nhau .
Khi ta chiếu ánh sáng trắng vào một vật thể bất
kì .Tại bề mặt vật thể sẽ xảy ra hiện tượng hấp thụ và phản xạ ánh sáng .
Ví dụ : Một vật thể có màu sắc đỏ khi được chiếu
ánh sáng trắng thì những ánh sáng không nằm trong dải bước sóng màu đỏ sẽ bị vật
thể hấp thụ .Còn ánh sáng có bước sóng nằm trong dải màu đỏ sẽ bị phản xạ ngược
trở lại .Và khiến mắt ta nhận biết vật thể đó là màu đỏ.
Màu sắc bất kì được tổng hợp từ 3 mầu cơ bản
Blue,Green,Red :
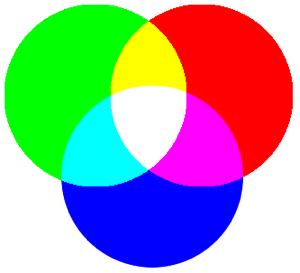
Dựa trên nguyên lý sự phản xạ , hấp thụ ánh sáng
trắng của vật thể và sự phối chộn màu sắc bởi 3 màu cơ bản Blue,Green,Red thì
TCS3200 có cấu tạo là 4 bộ lọc photodiode Blue,Green,Red và clear để nhận biết
màu sắc vật thể. Hình bên dưới là bảng test quá trình chuyển đổi từ ánh sáng mà 4 loại
photodiode nhận được thành tần số:
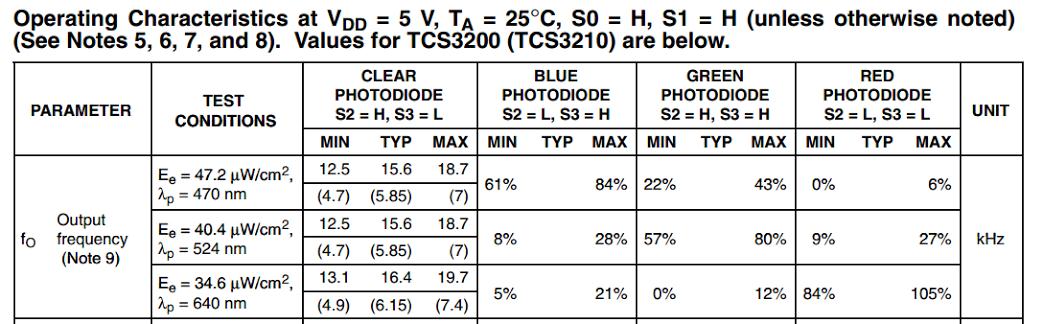
Với điều kiện test là ánh sáng có bước sóng λp = 470 nm(Dải
màu Blue),λp = 524 nm(dải màu Green),λp = 640 nm(dải màu Red) thì 4 bộ lọc
photodiode sẽ cho ra tần số khác nhau.Tần số ra lớn nhất khi ánh sáng chiếu vào
cảm biến cùng loại photodiode được chọn vì khi đó photodiode sẽ hấp thụ nhiều
nhất.
-
Giải pháp 2: Sử dụng mạch so sánh điện áp với các led phát và quang trở nhận ánh
sáng phản xạ. Mạch bên dưới có 3 led phát RED, GREEN và BLUE làm nguồn phát,
khi gặp vật có màu khác nhau ánh sáng phản xạ lại có cường độ khác nhau, dựa
vào cường độ phản xạ này mà ta nhận biết màu là xanh hoặc đỏ. Biến trở nối ở
chân vào đảo của OPAMP (chân 7) dùng để chỉnh điện áp tham chiếu, ta chỉnh sao
cho khi đưa bộ cảm biến này đối diện với màu xanh thì led ở đầu ra TẮT, bình
thường khi không bị ánh sáng chiếu vào thì LED SÁNG. Ta làm 2 mạch như bên dưới
để phát hiện 2 màu xanh, đỏ. Trên mạch ROBOT sử dụng 8051 của Góc kỹ thuật vẫn
còn chân P3.0 và P3.1 để nối với 2 đầu ra của bộ cảm biến bên dưới.
- Yêu cầu
điều khiển nhiều cơ cấu (kẹp thả, nâng hạ ...)
Cơ cấu cơ khí năm nay phức tạp hơn, ta cần tối thiểu 2
động cơ cho phép đảo chiều dành cho 2 bánh dẫn động chính, 1 động cơ nâng hạ
tay gặp, 1 động cơ vào ra, 1 động cơ kẹp thả khối ngọc. Trên mạch điều khiển
cung cấp trên Góc kỹ thuật này có 4 cầu H điều khiển 4 động cơ. Như vậy ta cần
thêm tối thiểu 1 bộ điều khiển động cơ nữa. Ta có thể sử dụng các động cơ RC
SERVO cho cho các chuyển động ngắn, đòi hỏi góc quay, các bạn có thể sử dụng
động cơ RC SERVO MG90S, MG996R hiện có
bán phổ biến trên thị trường. Các động cơ này sử dụng điện áp từ 5-6V và điều
khiển góc quay bằng độ rộng xung nên ta chỉ tốn 1 chân vi điều khiển để điều
khiển động cơ này.
Trên mạch ROBOT sử dụng 8051 vẫn còn chân P3.2 ở J12
để điều khiển động cơ này, ngoài ra ta có thể sử dụng các chân công tắc hành
trình ở P2.7, 2.6, 2.5, 2.4 để điều khiển tối đa 4 động cơ RC SERVO nữa.
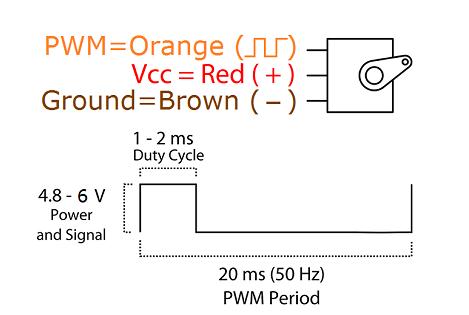
Hoạt động của động cơ này khá đơn giản, động cơ gồm 3
dây, PWM (cam), Vcc (Đỏ), Ground (Nâu) theo thứ tự như hình. Vcc và Ground là
chân cấp điện cho động cơ. Động cơ này có thể quay một góc xấp xỉ 180 độ và góc
quay này tỉ lệ với độ rộng xung cấp vào chân PWM. Tín hiệu PWM cấp cho chân
điều khiển này có tần số 50Hz. Vị trí ‘0’ là vị trí giữa tương ứng với độ rộng
xung là 1.5 ms, vị trí ’90 độ’ theo chiều kim đồng hồ tương ứng với độ rộng
xung 2ms, vị trí ’90 độ’ theo chiều ngược lại tương ứng với độ rộng xung 1ms,
các vị trí khác suy ra từ các độ rộng xung nằm giữa 1ms và 2ms.

ThS. Cao Nguyễn Khoa
Nam
Bộ môn tự động hóa-Khoa
Điện